
On cherche à construire une carte rigoureusement conforme et pratiquement orthodromique au voisinage d'un parallèle L0, que l'on se fixe.
Une carte orthodromique est une carte sur laquelle une orthodromie est représentée par une droite.
Etude du canevas
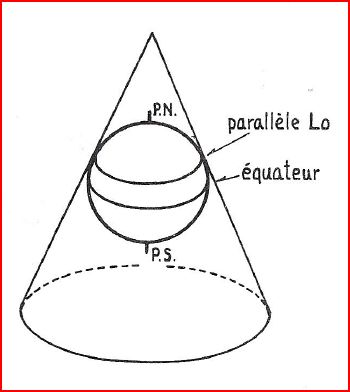
Le canevas Lambert est construit à partir
- d'une projection géométrique,
- depuis le centre de la sphère réduite,
- sur un cône tangent à cette sphère
- le long d'un parallèle L0
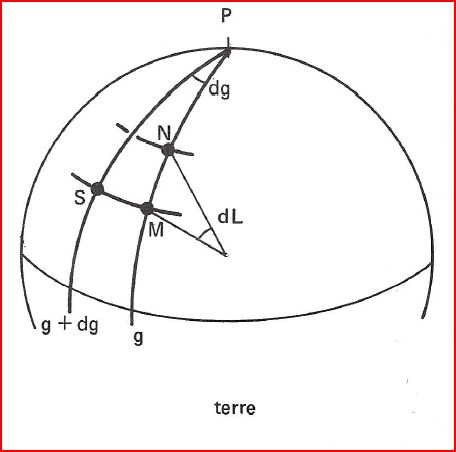
Commençons par placer:
- le Pôle
- un méridien
- un arc de cercle centré sur le pôle qui représentera le parallèle L0
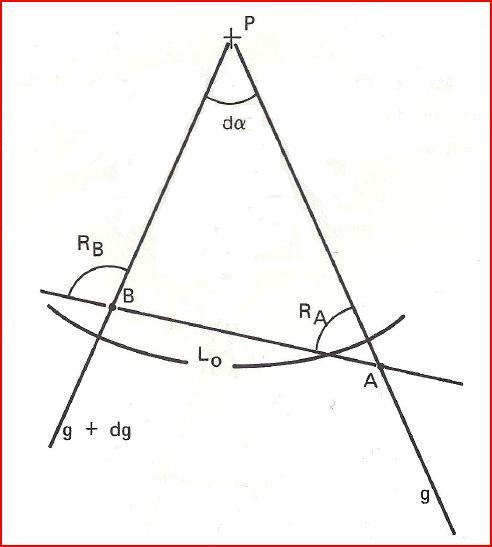
Essayons de placer le méridien de longitude g+dg. Pour cela considérons 2 points:
- A (g; Lo-dL)
- B (g+dg; L0+dL)
La droite AB étant trés proche de L0 devra représenter l'orthodromie.
Sur la Terre, la variation d'angle de route orthodromique entre A et B est égale à la convergence des méridiens:
RB-RA= dg x sin Lm avec Lm=L0
Sur la carte, RB-RA = dα
donc: \[ \boxed { dα = dg \times sinL_0}\]
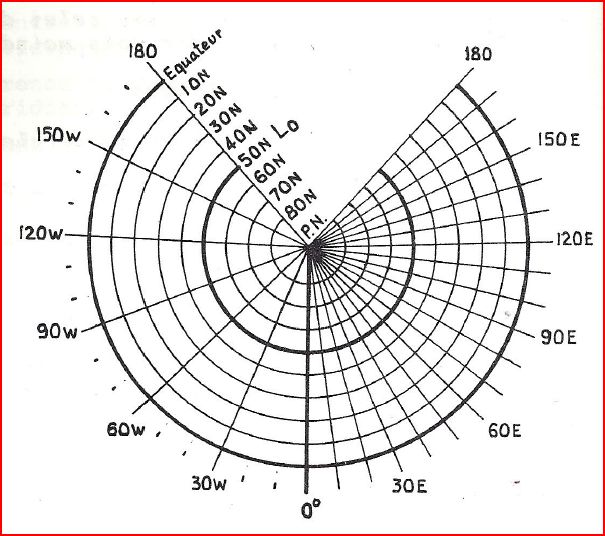
Comme sinL0 < 1, une carte Lambert couvrant un écart de 360° de longitude sera représentée par un secteur angulaire inférieur à 360°. Et cette carte ne sera pas conforme au pôle.
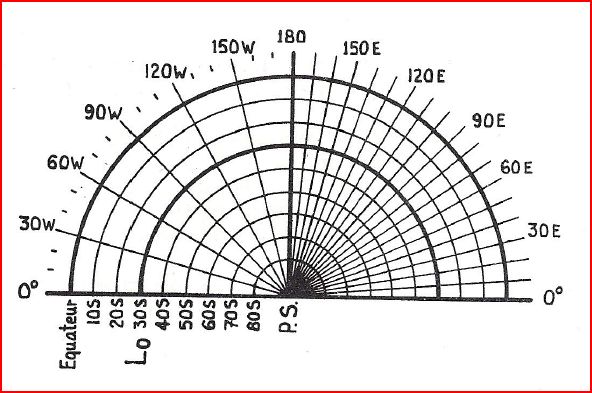
Par exemple voici
- un canevas Lambert tangent en 50°N (L0 =50N) : dα = 360 x sin 50 = 276°
- un canevas Lambert tangent en 30°S (L0 =30S) : dα = 360 x sin 30 = 180°
Essayons maintenant de placer les parallèles
Nous voulons que le canevas soit rigoureusement conforme, Pour cela, il faut que \(E_p = E_m\).
soient 3 points sur la Terre:
- M (g;L)
- N (g;L+dL)
- S (g+dg;L)
représentés sur la carte par m, n, s
(1) \(E_m = \frac{mn}{MN} = -\frac{dr}{R\times dL}\) (signe moins car si L augmente, r diminue)
(2) \(E_p = \frac{ms}{MS} =\frac{r \times dα}{R \times dg \times cosL}\)
(1) = (2) \(\Rightarrow \frac{dr}{R\times dL} = - \frac{r \times dα}{R \times dg \times cosL}\)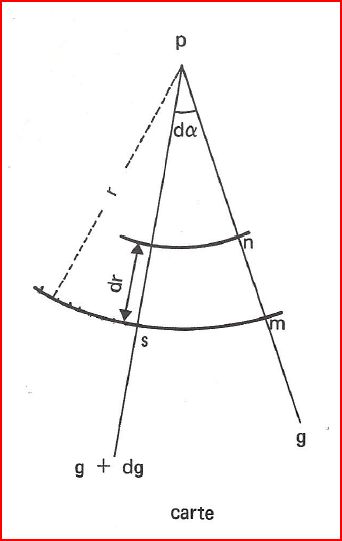
posons \(C= \frac{\pi}{2}-L \Rightarrow dL=-dC\) et \(cosL = sinC\)
C est la colatitude du parallèle de latitude L
nous avons alors \(\frac{dr}{r} = \frac{dα \times dC}{dg \times sinC}\)
hors dα = dg sinL0
\(\frac{dr}{r} = sinL_0 \times \frac{dC}{sinC}\) et si n= sinL0
\(\frac{dr}{r} = n \times \frac{dC}{sinC}\)
En intégrant cette équation, il vient:
\(Log\frac{r}{K} = n Log(tan\frac{C}{2}) = Log(tan\frac{C}{2})^n\)
\(r=K(tan\frac{C}{2})^n\)
Il nous reste à déterminer la constante K. Pour cela disons que C/2 = 45°
alors \(tan45 = 1\) et \(1^n=1\), et dans ce cas \(r=K\)
si C/2 = 45 alors C = 90° = π/2
et comme on a fixé C = π/2 - L, alors L = 0 et donc r = rE = rayon image de l'équateur.
Donc: \[\boxed{ r = r_E ( tan\frac{C}{2})}\] avec C = colatitude du parallèle de laitude L.
Détermination rapide de L0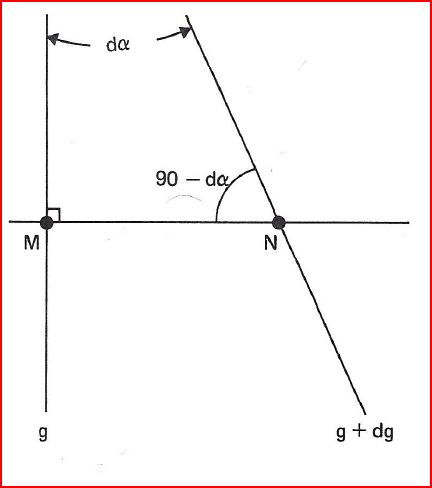
On sait que \(sinL_0 = \frac{dα}{dg}\)
- Choisir 2 méridiens suffisemments espacés ce qui permettra une mesure plus précise
- En un point M quelconque appartenant à un méridien, tracé une perpendiculaire
- Cette perpendiculaire coupe l'autre méridien en N
L'angle en N vaut 90 - dα, d'où on tire α
Mesure de distance entre 2 points
Proceder comme sur la carte Mercator.
Reporter la distance autour de la latitude moyenne entre A et B, le long d'un méridien.
Angle u entre ortho et droite carte ou pseudo correction de Givry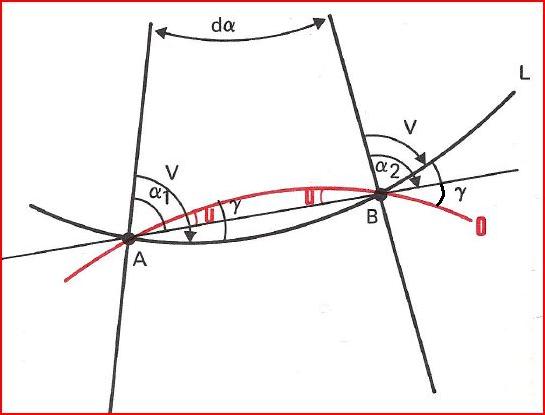
(1) en A: α1 = V - γ + u
(2) en B: α2 = V + γ - u
α1 - α2 = -2γ + 2u
or α2 = α1 + dα = α1 + dg x sinL0
Donc:
α1 - α2 = α1 - α1 - dg x sinL0 = 2u - 2γ = 2u - dg x sinLm
2u = dg x sinL - dg x sinL0
\[\boxed{u = \frac{dg}{2}(sinL_m - sinL_0)}\]
Angle δ entre loxo et droite carte
L'angle entre otho et loxo = correction de Givry = γ
(1) \(γ = \frac{dg}{2}sinL_m\)
(2) \(u = \frac{dg}{2}(sinL_m - sinL_0)\)
or \(δ = γ -u = \frac{dg}{2} \times sinL_0\)
\[\boxed{δ = \frac{dg}{2} \times sinL_0}\]
Mesure d'une route entre 2 points
Pour déterminer la route à adopter pour aller de A à B, on a besoin de connaître la route vraie moyenne entre ces 2 points. Or quelque
soit la trajectoire suivie, la route moyenne entre 2 points est toujours égale à la route loxodromique. D'où l'intérêt de savoir mesurer rapidement la route loxodromique entre 2 points.
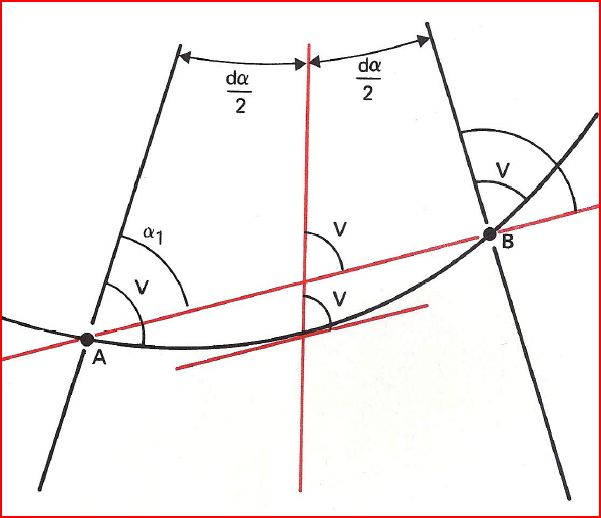
- Traçons le méridien central entre A et B
- Traçons la droite AB
- la tangente à la loxodromie sur le méridien central est parallèle à la droite AB
- En mesurant sur le méridien central l'orientation de la droite AB, on trouve la RV loxodromique
On peut aussi se contenter de mesurer les angles α1 et α2 et dire:
\(α_1 = V - \frac{dα}{2}\)
\(α_2 = V + \frac{dα}{2}\)
et donc :
\[\boxed { V = \frac{α_1 + α_2}{2} }\]
Ensuite , on connait γ, β, δ, u........